市場(chǎng)監(jiān)管總局解讀《餐飲服務(wù)食品安全操作規(guī)范》 保障餐飲服務(wù)安全

市場(chǎng)監(jiān)管總局對(duì)《餐飲服務(wù)食品安全操作規(guī)范》(以下簡(jiǎn)稱《規(guī)范》)進(jìn)行了詳細(xì)解讀,旨在進(jìn)一步強(qiáng)化餐飲服務(wù)食品安全管理,規(guī)范餐飲服務(wù)經(jīng)營(yíng)行為,保障消費(fèi)者飲食安全。
《規(guī)范》作為餐飲服務(wù)食品安全管理的重要技術(shù)性文件,涵蓋了餐飲服務(wù)從原料采購(gòu)、加工制作到供餐服務(wù)的全過(guò)程。市場(chǎng)監(jiān)管總局強(qiáng)調(diào),餐飲服務(wù)提供者應(yīng)當(dāng)嚴(yán)格按照《規(guī)范》要求,建立健全食品安全管理制度,明確各環(huán)節(jié)的責(zé)任人,確保食品安全風(fēng)險(xiǎn)可控。
在原料采購(gòu)方面,《規(guī)范》要求餐飲服務(wù)提供者選擇合規(guī)的供應(yīng)商,嚴(yán)格查驗(yàn)食品原料的合格證明文件,并建立進(jìn)貨查驗(yàn)記錄制度。對(duì)于易腐壞食品,需特別注意儲(chǔ)存條件和保質(zhì)期,避免使用過(guò)期或變質(zhì)的原料。
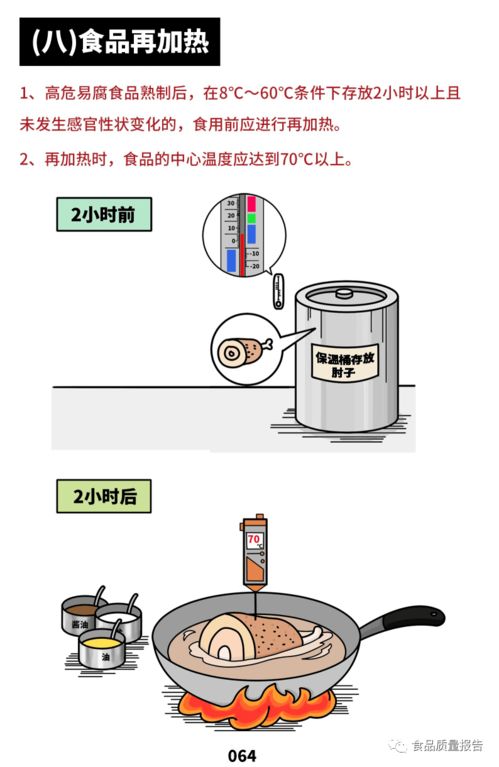
加工制作環(huán)節(jié)是食品安全的關(guān)鍵。《規(guī)范》指出,餐飲服務(wù)提供者應(yīng)嚴(yán)格執(zhí)行食品加工操作流程,做到生熟分開、避免交叉污染。食品加工人員需保持良好的個(gè)人衛(wèi)生,定期進(jìn)行健康檢查,并接受食品安全培訓(xùn)。對(duì)于烹飪溫度和時(shí)間,《規(guī)范》也提出了明確要求,確保食品徹底加熱,殺滅致病微生物。
供餐服務(wù)環(huán)節(jié)同樣不容忽視。《規(guī)范》強(qiáng)調(diào),餐飲服務(wù)提供者應(yīng)確保供餐環(huán)境的清潔衛(wèi)生,定期對(duì)餐具進(jìn)行消毒,并提供安全的飲用水。對(duì)于外賣和配送服務(wù),需使用符合食品安全標(biāo)準(zhǔn)的包裝材料,并采取保溫措施,防止食品在運(yùn)輸過(guò)程中變質(zhì)。
市場(chǎng)監(jiān)管總局還指出,《規(guī)范》的落實(shí)需要各級(jí)市場(chǎng)監(jiān)管部門加強(qiáng)監(jiān)督檢查,對(duì)違反規(guī)定的餐飲服務(wù)提供者依法處理。鼓勵(lì)消費(fèi)者積極參與監(jiān)督,通過(guò)12315平臺(tái)舉報(bào)食品安全問(wèn)題,共同營(yíng)造安全的餐飲消費(fèi)環(huán)境。
此次解讀進(jìn)一步明確了餐飲服務(wù)食品安全操作的具體要求,有助于提升全行業(yè)的食品安全水平。市場(chǎng)監(jiān)管總局將繼續(xù)完善相關(guān)法規(guī),推動(dòng)餐飲服務(wù)行業(yè)高質(zhì)量發(fā)展,切實(shí)保障人民群眾“舌尖上的安全”。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.xatyss.cn/product/5.html
更新時(shí)間:2026-05-26 06:23:45